To a graph theorist, Euler’s formula is a theorem about planar
graphs. To almost every other mathematician, it is a theorem about
three-dimensional solids. In this chapter, we’ll see the connection, and
put graph theory to work in understanding 3D geometry.
In the middle of this chapter is a section on dual graphs, which I’ve
included here because the duality between Platonic solids is a
particularly striking instance of dual graphs at work.
The discharging method used to prove Theorem 23.3 is a
common way to use Euler’s formula in proofs; it is also not a proof
strategy that’s easy to come up with on your own. So I think it’s a
particularly valuable proof to study, in case you ever encounter a
problem in which this method can be used.
The Platonic solids
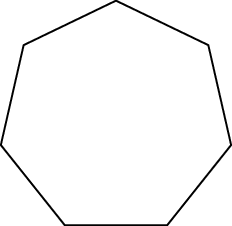
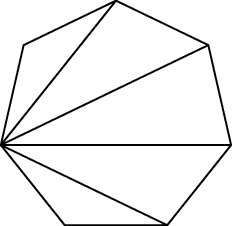
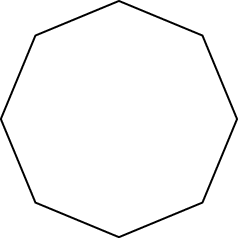
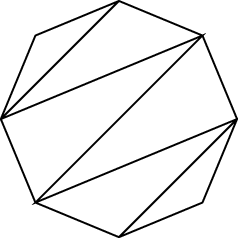
Regular polygons in the plane are abundant. For every \(n \ge 3\), it is possible to draw a polygon
with \(n\) equal sides and \(n\) equal angles. The sides can be however
long we want them to be, but the angles must all have measure \(\frac{n-2}{n} \cdot 180^\circ\) (or \(\frac{n-2}{n} \cdot \pi\), in radians). The
reason for this is that we can divide a regular \(n\)-sided polygon (or \(n\)-gon) into \(n-2\) triangles by drawing lines between
its corners: two ways to do this are shown in Figure 23.1. In a triangle, the sum of angles
is always \(180^\circ\); adding up the
angles of all triangles gives \((n-2) \cdot
180^\circ\), but this is also equal to the sum of all \(n\) angles of the regular \(n\)-gon.
A regular \(7\)-gon\(5\) triangles in a \(7\)-gonA regular \(8\)-gon\(6\) triangles in an \(8\)-gon
Dividing regular polygons into triangles
Things change when we go up to \(3\)
dimensions. The \(3\)-dimensional
version of a polygon is called a polyhedron. (The
plural is “polyhedra”.) This is a shape with flat polygonal faces which
come together at their sides and at their corners. If we want a
polyhedron to be as regular as possible, then we can ask for the faces
to be congruent regular polygons, with an equal number of them meeting
at every corner.
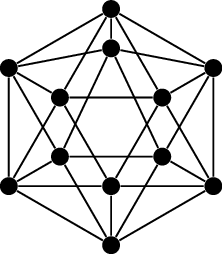
This much regularity is a lot to ask for! In fact, there are only
five possibilities once we ask for this much, shown in Figure 23.2. They are known as the
Platonic solids, named after their description in Plato’s
Timaeus, where Plato connects four of them to the four
classical elements. They were analyzed more geometrically in Euclid’s
Elements, and have been studied since then both mathematically
and mystically [38].
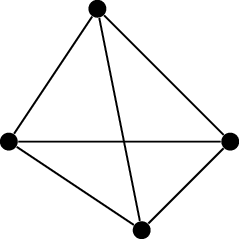
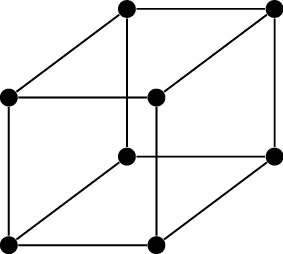
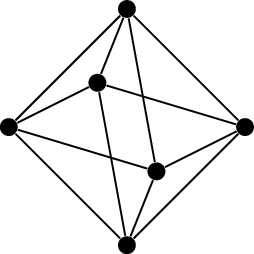
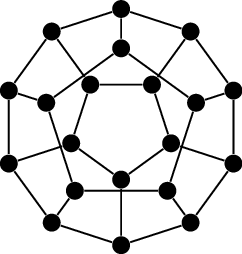
TetrahedronCubeOctahedronDodecahedronIcosahedron
The Platonic solidsHow many sides do the Platonic solids
have?
Going from left to right in Figure 23.2: \(4\), \(6\), \(8\), \(12\), and \(20\). The Greek names of the solids refer
to the number of sides: “tetra-” is a prefix that means \(4\), “octa-” means \(8\), and so on.
We will try to understand why there are just five of these solids.
For this, it is necessary to connect the problem to graph theory
somehow. You can probably already guess how we do it, by looking at the
diagrams in Figure 23.2,
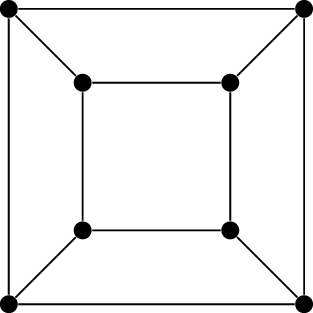
and maybe recognizing the cube (Figure 23.2(b))
and dodecahedron (Figure 23.2(d)) from previous
chapters. Each Platonic solid has an associated graph called its
skeleton graph. Its vertices are the corners of the polyhedron,
and its edges are the line segments where two of the polygonal faces
meet.
(Actually, these objects are also called “vertices” and “edges” by
geometers studying polyhedra. This is not a coincidence: graph theory
gets its terminology from geometry, and not the other way around!)
However, the skeleton graphs of the Platonic solids are not just any
kind of graph. They are planar graphs, and they have a plane embedding
in which the faces (the polygonal sides of the polyhedron) become the
faces of the plane embedding. This allows us to use the theory of planar
graphs we have developed in the previous two chapters to solve a
geometric problem.
There are two ways to get an intuition for how a polyhedron can be
turned into a planar graph. One way is to imagine the polyhedron to be
made of rubber; then, inflate the polyhedron until it becomes spherical,
bending the edges into arcs on the sphere. (You should imagine the edges
to be painted on, so that they do not get completely forgotten in this
process.) Then, poke a hole in the rubber sphere, and stretch it out
until it is flat; the drawing of the polyhedron on the sphere turns into
a drawing in the plane.
Is this possible for any polyhedron you
can imagine?
No: some polyhedra have “holes” in them,
and will inflate to a shape that is not a sphere. All five of the
Platonic solids do inflate to spheres.
For some reason, mathematicians often feel that arguments involving
imaginary rubber spheres are insufficiently rigorous. So here is another
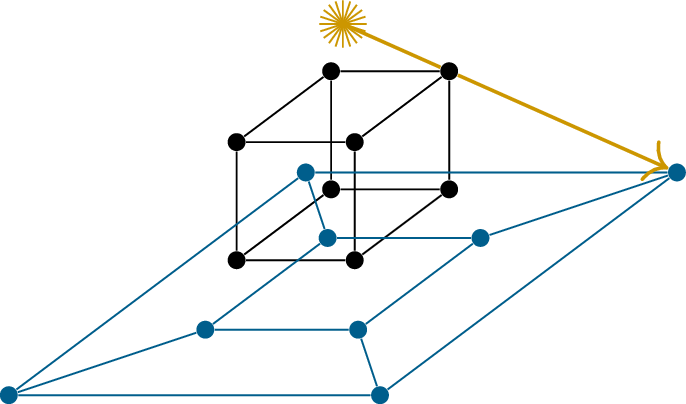
approach that is both visual and can be made rigorous. Hold the
polyhedron above a horizontal plane, oriented so that a face on top is
parallel to this plane. Place a bright light slightly above that face,
close enough so that an observer at the bright light would see the top
face and nothing else. Then the vertices and edges of the polyhedron
will cast a shadow onto the horizontal plane, and that shadow will
exactly be a plane embedding of the skeleton graph. An example is shown
in Figure 23.3(a).
The reason I say this can be made rigorous is that the projection via
bright light can be described mathematically: for example, if the bright
light is at point \((0,0,1)\) in \(\mathbb R^3\), and the horizontal plane is
the plane \(z=0\), then the shadow of a
point \((x,y,z)\) has coordinates \((\frac{x}{1-z}, \frac{y}{1-z}, 0)\).
Geometrically, the bright light, a point on the polyhedron, and its
shadow are collinear.
The shadow of a cubeA plane embedding of the cube
Going from a polyhedron to a planar graph
We still need to take care to make sure that no edges cross in the
shadow. A sufficient condition for this is to start with a convex
polyhedron: one with the property that if two points \(A\), \(B\)
are contained in the polyhedron, then so is the entire line segment
\(\overline{AB}\). When a ray of light
shines on a convex polyhedron, it always enters the interior of the
polyhedron once (through the top face) and exits once. For two edges to
cross in the shadow, the ray of light pointing at that crossing would
need to enter and exit multiple times: once in the top face, and once
for each edge that intersects at the crossing.
All of the polyhedra we consider in this chapter will be convex, and
so all of them can be described as planar graphs—not just the Platonic
solids. This correspondence can be taken even further, though. In
general, a graph has a plane embedding exactly when it has a spherical
embedding: when it can be drawn on the surface of a sphere without
crossing. The reason is that we can take a spherical embedding and turn
it into a plane embedding in exactly the same way that we’ve just done
it for a polyhedron. Going the other way, a plane embedding can be drawn
on the sphere just by using a small portion of the sphere that looks
basically flat. We do this (with a certain very large sphere) every time
we draw a picture in the dirt with a stick.
Classifying the Platonic
solids
In two dimensions, there are infinitely many regular polygons. So why
are there only five Platonic solids in three dimensions? This is, in
part, something we can prove from Euler’s formula, with a quibble I will
mention at the end of this section.
We can describe a Platonic solid by a pair \((p,q)\) where every face has \(p\) sides, and \(q\) faces meet at every vertex.
Geometrically, we must have \(p \ge 3\)
and \(q \ge 3\).
Why \(p\ge
3\)?
A polygon cannot have fewer than \(3\) sides.
Why \(q\ge
3\)?
If we try to have only two polygons meet
at a vertex, they end up lying flat against each other. I suppose I
can’t stop you from declaring that gluing two regular \(n\)-gons back-to-back is a Platonic solid
with \(2\) faces at every vertex, but
Plato wouldn’t have been on board with this.
We can further narrow down the options for \(p\) and \(q\) by using the properties of a planar
graph. (The planar graph must be connected, because a Platonic solid
should be connected: two cubes floating in space next to each other are
not a Platonic solid.)
Theorem 23.1. There are only five possibilities
for the pair \((p,q)\) in a Platonic
solid.
Proof. We can write down two equations for \(n\) (the number of vertices), \(m\) (the number of edges), and \(r\) (the number of faces) in terms of \(p\) and \(q\).
The graph is a \(q\)-regular
graph, so by the handshake lemma (Lemma 4.1), \(nq = 2m\).
Every face has length \(p\), so
by the face length formula (Lemma 21.3),
\(rp = 2m\).
We also have Euler’s formula (Theorem 21.4): \(n - m + r = 2\). Replacing \(n\) by \(\frac{2m}{q}\) and \(r\) by \(\frac{2m}{p}\), we get \[\frac{2m}{q} - m + \frac{2m}{p} = 2 \implies
\frac1q - \frac12 + \frac1p = \frac1m.\] From here, the
constraint that lets us narrow down the pairs \((p,q)\) is that \(\frac1m > 0\). Therefore \(\frac1q - \frac12 + \frac1p > 0\), or
\(\frac1p + \frac1q > \frac12\).
How can we get a total bigger than \(\frac12\) here? Let’s do casework on \(p\):
If \(p=3\) (every face is a
triangle) then \(\frac1q > \frac12 -
\frac1p = \frac16\), so \(q <
6\).
We can have \(q=3\) (three triangles
meet at every vertex), giving us the tetrahedron.
We can have \(q=4\) (four triangles
meet at every vertex), giving us the octahedron.
We can have \(q=5\) (five triangles
meet at every vertex), giving us the icosahedron.
If \(p=4\) (every face is a
square) then \(\frac1q > \frac12 - \frac1p
= \frac14\), so \(q <
4\).
We can have \(q=3\) (three squares
meet at every vertex), giving us the cube.
If \(p=5\) (every face is a
pentagon) then \(\frac1q > \frac12 -
\frac1p = 0.3\), so \(q <
\frac1{0.3} = 3\frac13\).
We can have \(q=3\) (three pentagons
meet at every vertex), giving us the dodecahedron.
These are the only possibilities: if \(p
\ge 6\), then not even \(q=3\)
is small enough for the inequality \(\frac1p +
\frac1q > \frac12\) to hold. ◻
In each of these cases, once we know \(p\) and \(q\), we can solve for \(n\), \(m\), and \(r\).
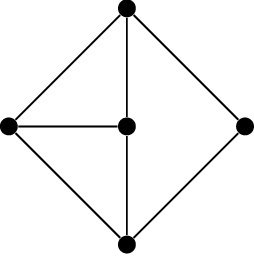
What must \(n\), \(m\), and \(r\) be if \((p,q)
= (3,4)\)?
Starting from Euler’s formula \(n-m+r=2\), we can substitute \(n=\frac{2m}{q} = \frac 12m\) and \(r = \frac{2m}{p} = \frac 23m\) to get \(\frac 12m - m + \frac 23m = 2\), or \(\frac 16m = 2\). Therefore \(m=12\), and now we can back-substitute to
get \(n = \frac 12m = 6\) and \(r = \frac 23m = 8\). This is the
octahedron: it has \(n=6\) vertices,
\(r=8\) faces, and \(m=12\) edges.
In general, the equation \(\frac1q -
\frac12 + \frac1p = \frac1m\), which can be rearranged to get
\(m = \frac{1}{1/p + 1/q - 1/2}\). Then
\(n = \frac{2m}{q}\) and \(r = \frac{2m}{p}\) tells us the number of
vertices and the number of faces. Here is the complete table (where
\(\langle q\rangle \times n\) stands
for the degree sequence \(q,q,\dots,q\) of
length \(n\)):
Vertices
Degrees
Edges
Faces
Tetrahedron
4
\(\langle3\rangle \times 4\)
6
4
Cube
8
\(\langle3\rangle \times 8\)
12
6
Octahedron
6
\(\langle4\rangle \times 6\)
12
8
Dodecahedron
20
\(\langle20\rangle \times 3\)
30
12
Icosahedron
12
\(\langle12\rangle \times 5\)
30
20
I promised to mention a quibble I have with calling this a complete
classification of the Platonic solids. Well, first of all, it is only a
classification of the skeleton graphs of those solids: we have not (and
will not) engage with the 3D geometry. Even so, one thing is
missing.
How could there, conceivably, be another
regular planar graph where every face in a plane embedding has the same
length, other than the ones in Figure 23.2?
It’s possible that there are several
different non-isomorphic graphs corresponding to a single pair \((p,q)\).
So is there a second icosahedron where the faces attach differently?
There is not, but that takes some effort to prove. In principle, it’s a
finite problem: up to isomorphism, there are only finitely many graphs
with \(20\) or fewer vertices, and we
could simply check them all and verify that none of them have the
regularity properties we asked for.
It would be nice to have a more elegant argument, though. For the
smaller Platonic solids, this is achievable. For example, the pair \((p,q) = (3,3)\) must correspond to a \(3\)-regular, \(4\)-vertex graph, and there is only one
such graph: the complete graph \(K_4\).
Slightly more complicated, but similar arguments work for \((p,q) = (3,4)\) and \((p,q) = (4,3)\); since I know it’s possible
to handle these two cases in a slick way, I will leave it for you to
discover in the exercises at the end of this chapter. I am not aware of
any arguments for \((p,q) = (3,5)\) and
\((p,q) = (5,3)\) that do not require a
substantial amount of suffering, so I will not make you deal with those
cases.
Dual graphs
If you look at the table counting vertices, edges, and faces in the
Platonic solids, you may notice an interesting pattern: the five solids
can be divided into two and a half pairs for which these counts are
related. The triple \((n,m,r)\)
counting the vertices, edges, and faces is \((8,12,6)\) for the cube and it is \((6,12,8)\) (the reverse) for the
octahedron; it is \((20,30,12)\) for
the dodecahedron and \((12,30,20)\)
(the reverse) for the icosahedron.
Why “two and a half” pairs?
The tetrahedron can be paired with itself,
because it has the same number of vertices and faces.
There is another correspondence between vertices and faces that you
may have noticed before. The face length formula for plane embeddings is
very similar to the handshake lemma: if \(F_1,
F_2, \dots, F_r\) are the faces and \(x_1, x_2, \dots, x_n\) are the vertices,
then \[\sum_{i=1}^r \operatorname{len}(F_i) =
2m = \sum_{i=1}^n \deg(x_i).\] Is this a coincidence?
Mathematicians should always be on the lookout for such
“coincidences”, because it often turns out that they reveal a deeper
idea. In this case, it leads to the definition of dual graphs.
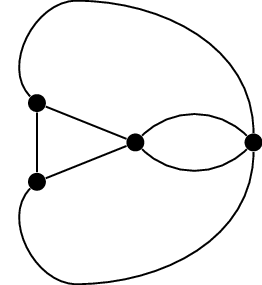
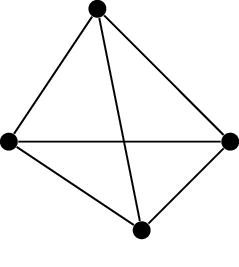
The dual graph of a plane embedding is not really a
graph, but a multigraph whose vertices are the faces of the plane
embedding; for every edge in the plane embedding, there is an edge in
the dual graph between the faces that meet there. For example, Figure 23.4(d) shows the dual graph of the plane
embedding in Figure 23.4(a).
The definition mentions that the dual
graph is actually a multigraph. When does it have loops?
When the original plane embedding has an
edge with the same face on both sides. A vertex of degree \(1\) guarantees that this will happen,
though it is not the only way.
What about parallel edges?
The dual graph has parallel edges when two
faces border each other along multiple edges. A vertex of degree \(2\) guarantees that this will happen,
though it is not the only way.
A plane embeddingCareful setupDrawing the edgesThe dual graph
The dual graph of a plane embedding
The mere existence of the dual graph, carefully defined, is enough to
derive the face length formula as a consequence of the handshake lemma.
For relationships like those between the Platonic solids to holds,
something more has to happen: the dual graph must itself be a planar
graph (or multigraph).
Proposition 23.2. The dual graph of a plane
embedding is also planar.
Proof.Figure 23.4 shows
the process of carefully constructing the dual graph in such a way that
we get a plane embedding of the dual graph at the same time.
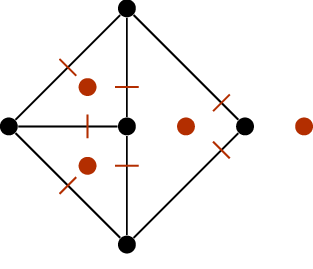
Begin by drawing a dual vertex somewhere in the interior of each
face, and marking a crossing point somewhere in the middle of each edge.
This is shown in Figure 23.4(b).
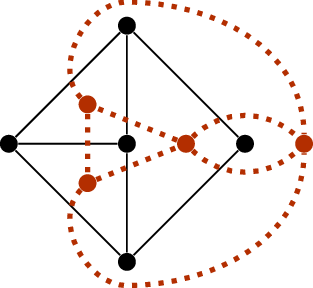
Next, to draw a dual edge between the dual vertices inside faces
\(F_i\) and \(F_j\), we draw a curve from the dual vertex
inside \(F_i\), to the crossing point
on the edge that \(F_i\) and \(F_j\) share, to the dual vertex inside
\(F_j\).
We still need to be careful to avoid crossings, but the setup means
we need to be less careful. In order to know that this construction can
always be carried out, we only need to know one thing: inside a face
\(F_i\), we can draw non-intersecting
curves from the dual vertex to all the crossing points on the boundary
of \(F_i\). This is a “local” geometric
claim that doesn’t require us to consider the plane embedding as a
whole. ◻
There are several properties that the dual graph isn’t required to
have, but that it will have in sufficiently nice cases. For example,
strictly speaking, it is incorrect to refer to the “dual graph of \(G\)”, where \(G\) is a planar graph. The dual graph is
defined based on a plane embedding of \(G\), not based on \(G\) itself. Sometimes we can get
legitimately different dual graphs by choosing a different plane
embedding, though the graph in Figure 23.4(a) and
the skeleton graphs of the Platonic solids do not allow this.
From the plane embeddings we’ve seen so
far, can you give an example where two different ones are guaranteed to
give non-isomorphic dual graphs?
In Chapter 21,
Figure 21.5(a) and Figure 21.5(b) showed two plane
embeddings of the same graph where the faces had different lengths. The
dual graphs we get from these embeddings will not be isomorphic, because
their vertices will have different degrees.
In Figure 23.4(c), only the color indicates
which edges are edges of the original plane embedding, and which edges
are edges of the dual graph. Here, the dual relationship holds in both
directions: each vertex of the original plane embedding lies in a face
of (the plane embedding of) the dual graph. In such a scenario, taking
the dual graph twice brings us back to where we started, up to
isomorphism. However, it is not guaranteed to happen; it is even
possible for a plane embedding to have more vertices than the dual graph
has faces.
Given a connected plane embedding with \(n\) vertices, \(m\) edges, and \(r\) faces, however, the dual graph will
always have \(n\) faces (as well as
\(m\) edges and \(r\) vertices). The number of edges and
vertices in the dual graph follows from the definition, but the number
of faces follows from Euler’s formula. Applied to the original plane
embedding, it tells us that \(n - m + r =
2\). Meanwhile, if we suppose that a plane embedding of the dual
graph has \(n'\) faces, then \(r - m + n' = 2\); together, these two
equations imply that \(n =
n'\).
Must the dual graph of a plane embedding
always be connected?
Yes: given any two faces \(F\) and \(F'\) (which are vertices of the dual
graph), draw any curve from the inside of \(F\) to the inside of \(F'\), only making sure it does not pass
through any vertex. The faces that the curve passes through form an
\(F-F'\) walk in the dual
graph.
Finally, there is more to the story of duality in the case of
Platonic solids (and some other polyhedra). For the skeleton graph of a
polyhedron, we can construct a dual graph in a way that reflects the
geometry of the polyhedron, by doing the following:
For the dual vertex corresponding to a face \(F\) of the polyhedron, draw a point in the
geometric center of face \(F\).
For the dual edge connecting adjacent faces \(F\) and \(F'\), draw a line segment between the
two points in the centers of \(F\) and
\(F'\).
Because the dual vertices are adjacent exactly when the corresponding
faces are adjacent, this is still a geometric realization of the dual
graph. (It is not a plane embedding because it’s all happening in three
dimensions.)
This kind of dual turns the cube into the octahedron (and vice versa)
geometrically, not just graph-theoretically; the same is true for the
icosahedron and dodecahedron!
In general, though, this construction is
not guaranteed to turn a polyhedron into another polyhedron. What could
go wrong?
The resulting points and line segments do
not necessarily form faces that lie flat! If the dual graph has a face
of length \(4\) or more, then the
points on the boundary of that face might not end up lying on a single
plane.
Archimedean solids
The definition of a Platonic solid is the most restrictive
generalization of a regular polygon to three dimensions. A slightly less
restrictive, and still very interesting, definition is that of an
Archimedean solid.
These are convex polyhedra whose faces are all regular polygons, and
whose vertices are all symmetric to each other (that is, for any two
vertices, there is some rotation or reflection of the polyhedron that
can move one to the other). Notably missing from this definition is any
kind of symmetry between faces: in an Archimedean solid, the faces do
not all have to be the same!
The truncated tetrahedron is one small example of an Archimedean
solid. Geometrically, it is obtained as follows: start with a
tetrahedron, and cut off each vertex a third of the way along its edge,
as shown in the picture below. The truncation process is shown in
Figure 23.5.
TetrahedronTruncated tetrahedron
Truncating a tetrahedron
The truncated tetrahedron has two types of faces: four hexagons (left
over from the original faces of the tetrahedron) and four triangles
(from where the cuts were made).
As with the Platonic solids, we can at the very least determine the
global face, vertex, and edge counts from a local description of what is
happening at every vertex. Let’s see how, using the truncated
tetrahedron as an example. (Imagine that we don’t have the diagram in
Figure 23.5(b) to use as a
reference.)
Every vertex of the truncated tetrahedron is a third of the way along
some edge of the tetrahedron. The two faces that meet there are two
hexagons (from the two faces of the tetrahedron that met along that
edge) and one triangle (from the cut that created that vertex). This is
all the “local information” we will need. The variables we will solve
for are:
\(m\), the number of
edges.
\(n\), the number of
vertices.
\(r_3\), the number of \(3\)-sided faces (triangles).
\(r_6\), the number of \(6\)-sided faces (hexagons).
We will need four equations, because there are four variables.
Euler’s formula is one of them: it tells us that \(n - m + (r_3 + r_6) = 2\). It is tempting
to use the face length formula, which tells us that \(3r_3 + 6r_6 = 2m\), but this is less
convenient because it involves three variables; instead, we take the
handshake lemma, which tells us that \(3n =
2m\). For the other two equations, we use the the local
information about what happens at each vertex.
If there are \(n\) vertices, and each vertex the corner of
one of the \(r_3\) triangles, what is
\(r_3\) in terms of \(n\)?
There is a \(3\)-to-\(1\) correspondence between vertices and
triangles: each vertex has \(1\)
triangle, but each triangle has \(3\)
vertices. So \(n = 3r_3\).
What about the relationship between \(n\) and \(r_6\)?
Here, the correspondence is \(6\)-to-\(2\): each vertex has \(2\) hexagons that meet there, and each
hexagon has \(6\) vertices at its
corners. So \(2n = 6r_6\).
In general, such equations are determined by two quantities: the
number of sides each type of face has, and the number of faces of that
type that meet at each vertex.
Now we can write Euler’s formula solely in terms of \(n\), by replacing each variable by a
multiple of \(n\): since \(m = \frac32n\) and \(r_3 = r_6 = \frac13n\), Euler’s formula
turns into \[n - \frac32n + \frac13n +
\frac13n = 2.\] When we simplify, we get \(n=12\). Therefore \(m = \frac32n = 18\), \(r_3 = \frac13n = 4\), and \(r_6 = \frac13n = 4\): exactly the
parameters of a truncated tetrahedron!
There is a way to make this process more systematic, while also
generalizing it to be able to deal with even less regular polyhedra.
To do so, we define the angle defect at a corner of a
polyhedron to be \(2\pi\) minus the sum
of the angles of the polygons meeting at that corner. (We’ll work in
radians from now on; in degrees, we’d take \(360^\circ\) instead of \(2\pi\).) Since the angle defect would
always be \(0\) if the corner were
flat, this is a measure of how much the polyhedron “bends” at a
corner.
For a convex polyhedron (or any polyhedron for which Euler’s formula
holds), no matter how many vertices there are, the total amount of
“bend” must be the same. This was originally shown by René Descartes,
the inventor of coordinate geometry [34]:
Theorem 23.3. In any convex polyhedron, the sum
of all angle defects is \(4\pi\).
Proof. This could be done by solving a system of equations,
but there is a more elegant proof by a strategy called the “discharging
method”. We take the skeleton graph of the polyhedron, and put a
“charge” of \(+2\pi\) on each vertex,
\(+2\pi\) on each face, and \(-2\pi\) on each edge. The total charge on
the graph is \(2\pi n - 2\pi m + 2\pi
r\), and we’ve chosen our initial charges so that the total
charge would simplify to \(4\pi\) by
Euler’s formula.
In physics, positive and negative electric charges cancel. Probably.
I’m not a physicist. In this proof, we will move around the charges
we’ve placed on the polyhedron to cancel them, while not changing the
overall sum. First, from each face, we move \(+\pi\) charge on to each of its edges. This
leaves each edge at charge \(0\); it
started at \(-2\pi\), but gained \(+\pi\) from each of the two faces it
borders. However, each face has now gone into the negatives: a face of
length \(l\) now has charge \(-(l-2)\pi\).
In an \(l\)-sided polygon, the sum
of angles is \((l-2)\pi\) (as observed
at the beginning of this chapter for regular polygons). So we can bring
each face up to zero charge with a second transformation: for every
corner of every face, if that corner makes an angle of \(\theta\) on that face in the polyhedron, we
move \(\theta\) charge from the vertex
at that corner to the face.
When we’re done, the faces and edges all have charge \(0\), while the remaining charge at each
vertex is exactly the angle defect. However, the sum of the charges has
remained at \(4\pi\) throughout,
proving the formula. ◻
Theorem 23.3 can be used to quickly count the
vertices in any Archimedean solid. For example, in the truncated
tetrahedron, a regular triangle and two regular hexagons meet at each
vertex, forming one angle of measure \(\frac\pi3\) and two angles of measure \(\frac{2\pi}{3}\). This means that the angle
defect at each vertex is \(2\pi - \frac\pi3 -
2(\frac{2\pi}{3}) = \frac\pi3\). The total angle defect is \(4\pi\), so there must be \(\frac{4\pi}{\pi/3} = 12\) vertices.
Practice problems
Draw a plane embedding of the skeleton graph of the
dodecahedron.
The skeleton graph of the icosahedron is pancyclic: it has a
cycle of every length from \(3\)
to \(12\). Verify this by finding a
cycle of each length.
Determine the dual graph of any plane embedding of any \(n\)-vertex tree, up to isomorphism.
(This example goes to show that two planar graphs with isomorphic
duals are not, themselves, necessarily isomorphic.)
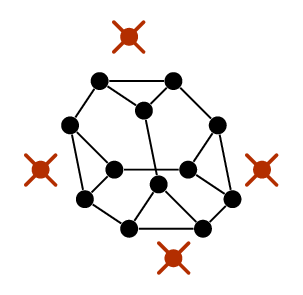
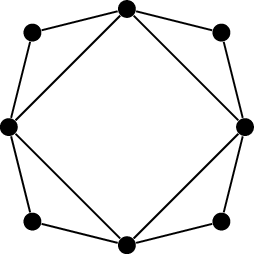
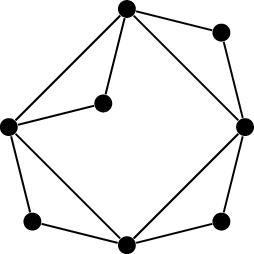
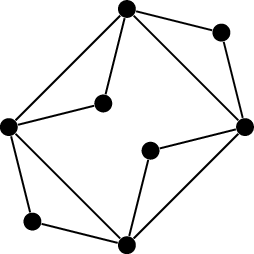
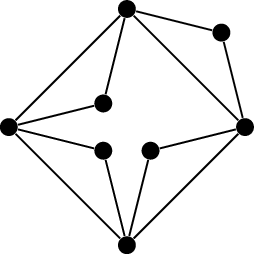
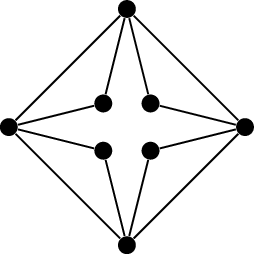
Here are five different plane embeddings of a graph \(G\):
For each plane embedding, draw the dual graph. Determine which of
these graphs are isomorphic to each other, and which are not.
By going from a plane embedding to a spherical embedding and back
to a plane embedding (using the projection technique in Figure 23.3), prove that for any
face \(F\) of a plane embedding of
\(G\), there is a plane embedding of
\(G\) where \(F\) is the outer face.
A uniform \(n\)-gonal prism is a
prism with \(n+2\) faces: two regular
\(n\)-gons on the top and bottom, and
\(n\) squares around the sides.
Draw a plane embedding of the skeleton graph of a uniform \(n\)-gonal prism where \(n\) is some very big number—like \(6\). Explain how to draw such a plane
embedding for any value of \(n\).
Draw the dual graph of the plane embedding you drew in part (a).
Describe the structure of this dual graph for arbitrary values of \(n\).
Geometrically, what does the dual polyhedron of the \(n\)-gonal prism look like?
(AIME 2004) A convex polyhedron \(P\) has \(26\) vertices, \(60\) edges, \(36\) faces, \(24\) of which are triangular, and \(12\) of which are quadrilaterals. A space
diagonal is a line segment connecting two non-adjacent vertices that do
not belong to the same face. How many space diagonals does \(P\) have?
How many of the numbers given in part (a) are redundant
information?
Here are few more questions about Archimedean solids.
An icosidodecahedron is an Archimedean solid with \(12\) pentagonal faces (like a dodecahedron)
and \(20\) triangular faces (like an
icosahedron). How many vertices and edges does it have? How many faces
of each type meet at each vertex?
A snub cube is an Archimedean solid with four triangles and one
square meeting at every vertex. How many vertices and edges does it
have, and how many faces of each type?
What about the truncated icosidodecahedron, in which a \(4\)-sided face, a \(6\)-sided face, and a \(10\)-sided face meet at every
vertex?
Suppose that \(G\) is an \(n\)-vertex planar multigraph such that (for
at least one plane embedding of \(G\))
the dual graph is isomorphic to \(G\).
(We call such a multigraph self-dual.)
How many edges must \(G\) have,
in terms of \(n\)?
Find an example of such a graph \(G\) for all \(n
\ge 2\).
In this problem you will prove that the standard octahedron and
cube are the only possible Platonic solids with their parameters, at
least from the point of view of graph theory.
It follows from Theorem 23.1 that any
Platonic solid with \((p,q)=(3,4)\) is
a \(4\)-regular \(6\)-vertex graph. Prove that there is only
one such graph (up to isomorphism).
It follows from Theorem 23.1 that any
Platonic solid with \((p,q)=(4,3)\) is
a \(3\)-regular \(8\)-vertex graph. Unfortunately, there are
multiple such graphs. However, the graph must also have a plane
embedding in which every face has length \(4\), and by a practice problem at the end
of Chapter 21, it must be bipartite.
Prove that there is only one bipartite \(3\)-regular \(8\)-vertex graph (up to
isomorphism).